
那辆白色 SUV 变了三次道,最后停在我后面


那辆白色 SUV 变了三次道,最后停在我后面
导读: 频繁切换≠进展。1999 年 Nature 杂志早就说过,邻道并没有更快。
那辆白色 SUV
五一我从长沙开车去湘潭,云栖路上长潭西高速。
云栖路那段路平时就不通畅,节假日更堵。前面一辆车犹豫一下,后面就是一长串刹车灯。我跟着前车,时走时停,仪表盘上的速度像心电图。
上了长潭西之后,路况立刻松了一大截。那天车不算特别堵,但也称不上畅通 — 就是节假日傍晚那种”既不能踩到底,也没必要换挡”的速度。我走中间偏右那条道,速度稳定,前后的车间距都还行。
然后那辆白色 SUV 出现了。
第一次它从我左边超过去,加塞进我前面。变道动作干脆利落,方向灯打得很短。第二次它发现左边那条道停了,又把车头别回中间道。第三次我已经记不清了,反正后视镜里一会儿是它的车标,一会儿是它的尾灯,像一个一直在你身边焦虑地动来动去的人。
我没有按喇叭,也没生气。开了这么多年车,对这种 SUV 我有一种格式化的反应 — 哎,又是这种。
接着我们就一起开了大概 30 公里,进入收费站。
整段路加起来不过 40 多分钟。我把车停在最右侧的 ETC 通道前,慢慢减速。仪表盘亮起一声”咚”,杆抬起来,我滑过去。眼角余光扫到旁边一格 — 那辆白色 SUV 就停在我后面。
它切了三次道,最后停在我后面。
这不是一辆车的事。这是我五一这 40 多分钟里,看见的、记得住的所有车里,唯一一辆我能讲出”它做了什么”的车。其他的车都没做什么 — 它们就是开过去了。
但这辆 SUV 一直在我视野里。它一直在动。它做了三次决定,三次切换车道,三次”我要更快”。
下高速的时候它在我后面。
我开车这么多年,类似的场景见过太多次了,多到我下意识就会心想:哎,怎么是它。这个反应背后是一个非常朴素的判断 — 那些一路在切道的人,最后总不会跑到很前面去。
我一直没去追问这个判断从哪来。直到那天傍晚到了湘潭,我把行李拎进屋,坐下倒了一杯水,忽然想到一个问题 —
那辆 SUV 切了那么多次,它本来打算去哪?
1999 年的那篇论文
如果你跟我一样开过几年车,多半也会有过这种疑惑:明明邻道看起来一直在跑,凭什么我就堵在这儿?
而且这种感觉不会因为你已经识破了它而消失。我下次再开车,邻道一开始动,我心里那个想换过去的念头还是会冒出来。它是一种身体反应,不是想法。
1999 年,加拿大两位研究员,Donald Redelmeier 和 Robert Tibshirani,在 Nature 杂志上发表了一篇文章。题目叫 Why Cars in the Next Lane Seem to Go Faster(《为什么下一条车道看起来跑得更快》)。这是一篇通讯文章,正文很短,杂志卷 401 第 35 页 — 但从此以后,几乎所有关于高速变道的严肃讨论都从它开始。
他们的结论一句话能讲完:被超车的过程比超车的过程更耗时间。
意思是,当邻道有几辆车从你旁边连续超过去,那段时间你是清清楚楚地”看着”它们的。你扭头扫一眼,感受到一种”我在变慢”的体感。这种体感会被身体放大。反过来,当你超过邻道的几辆车时,你的目光在前方,脑子在算车距,身体的注意力没有给到旁边 — 你超车的那一两秒,几乎是没有”被记忆”的。
加起来就是:你记得自己被超过的所有时刻,但忘记了自己超过别人的所有时刻。于是邻道总是看起来更快。
这是错觉的根源。

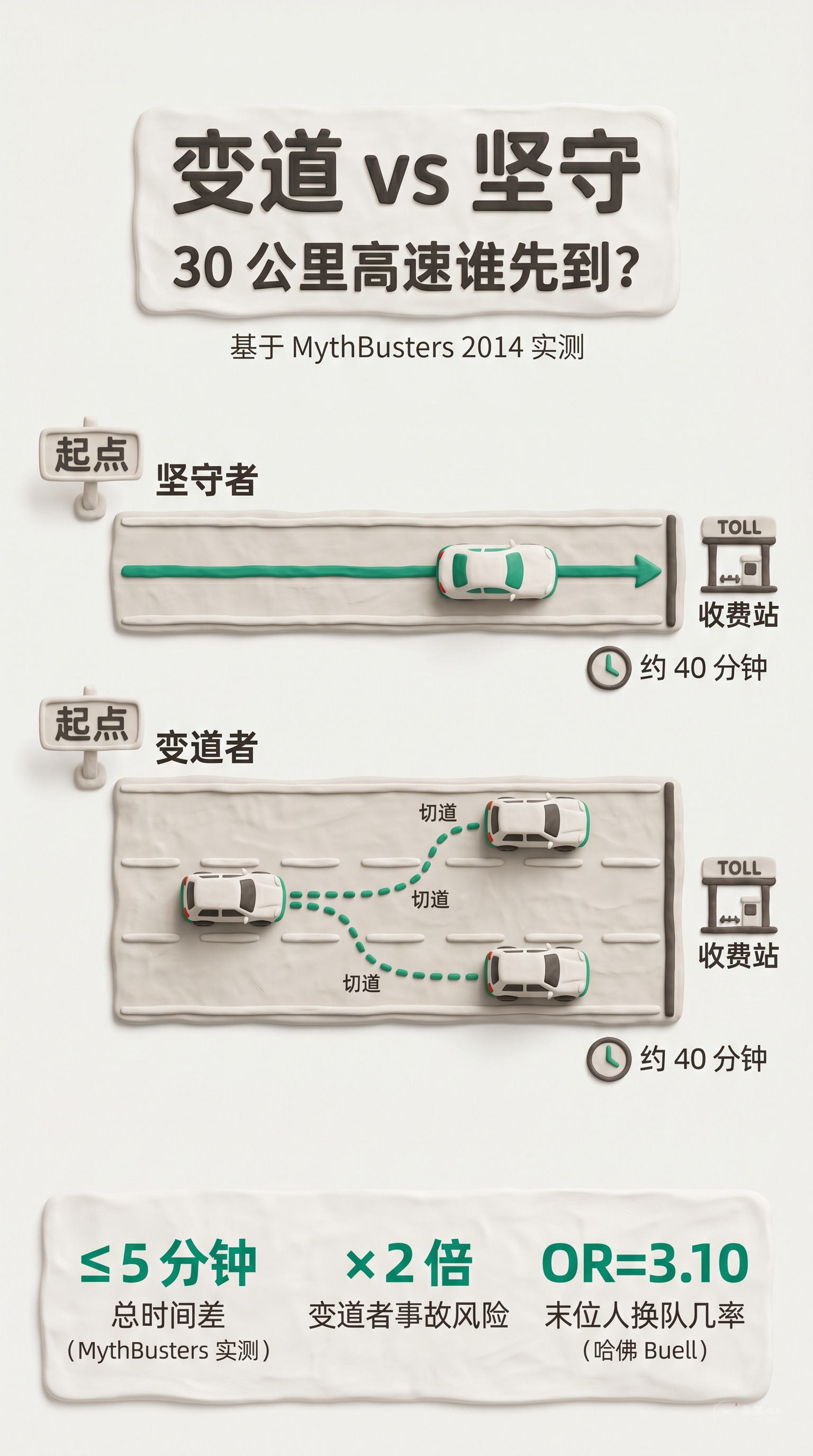
后来,2014 年,美国电视节目 MythBusters(《流言终结者》) S2014E08 用一整集的时间做了个实测。他们找了洛杉矶高峰期的高速公路,两辆车并行 50 英里。一辆固定在他们认为”看起来最快”的中间道,另一辆每次看到哪条道更快就切过去,整整 50 英里都在变道,节目组叫它 weaver。
结果出来:不论坚守还是不停变道,整段行程总时间几乎不受影响。差距不到 5 分钟,节目里被打上一个大大的 BUSTED。
而且 weaver 那辆车的事故风险,显著高于坚守者。
更扎心的是 2002 年牛津的一篇论文。哲学家 Nick Bostrom 写了一篇短文,题目叫《下一条车道确实更快 — 观察选择效应》。他从概率角度解释了一个反直觉的现象:慢车道里塞着更多车,是数学决定的。
逻辑是这样的:堵车时,慢的那条道,单位长度上挤的车比快的那条道多。所以你被随机投放进慢车道的概率,本来就比被投放进快车道高。换句话说,你以为邻道在跑,是因为你被采样进了一条更慢的道里 — 但你不知道。
我把这三件事讲给一个朋友听。他听完愣了一下,问我:“那为什么我每次还是会想变道?”
我说:因为身体比脑子快。
你不是在赶路,是在比邻车
回到那辆白色 SUV。
我后来想,它做错了什么吗?
严格来说,它每一次决策都”是对的”。它每一次切道的瞬间,它切过去的那条道确实在那一秒比它原来的那条快。它每次都选了”当下更快”的那条道。从一个 5 秒的时间窗口看,它每一次都没错。
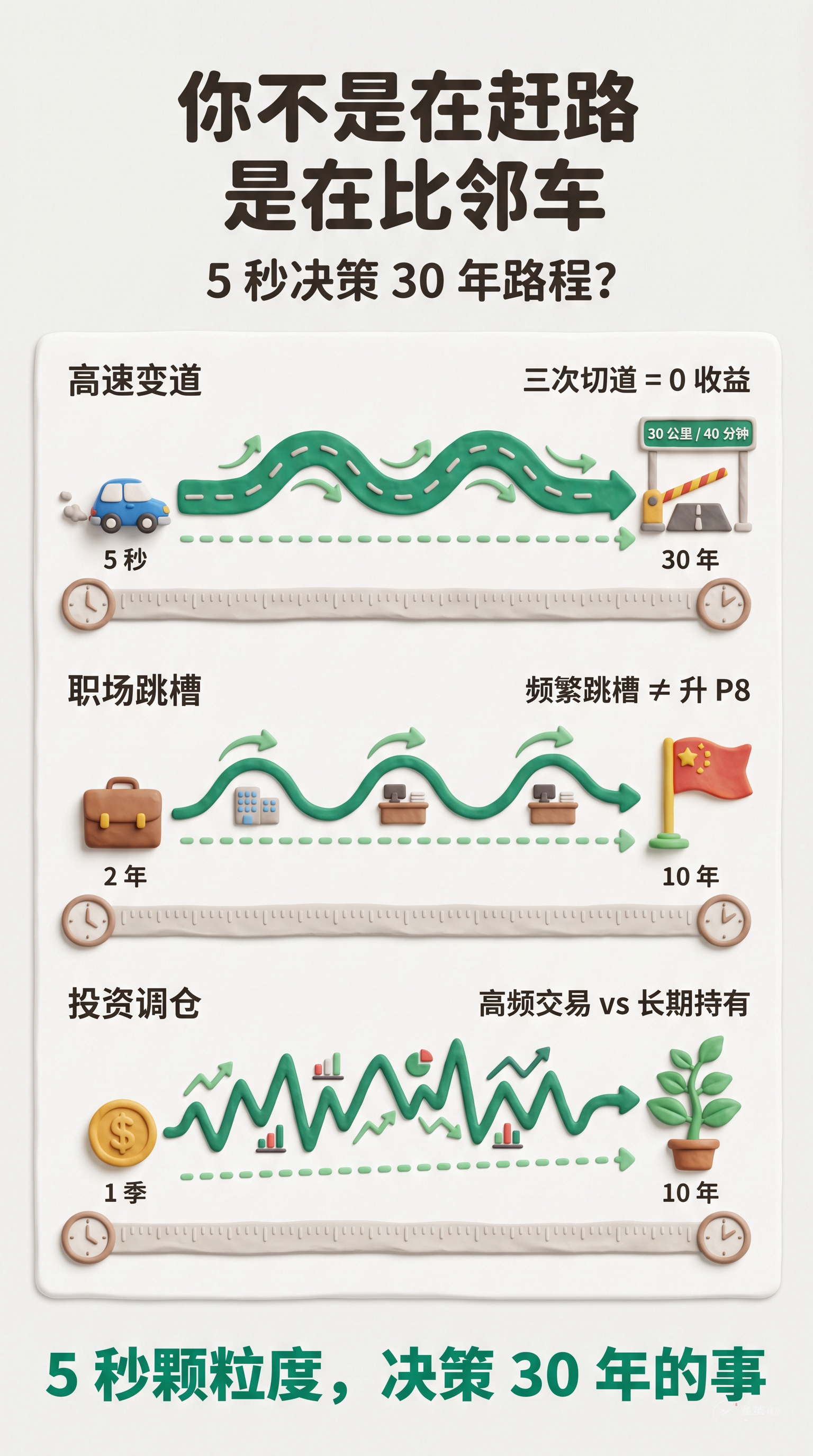
但它用 5 秒的时间窗口,决策一段 30 公里的路程。
5 秒里”更快”的那条道,30 分钟之后是什么样的,它不知道。
这是事情真正出错的地方。不是它不努力,也不是它不聪明。是它用错了时间尺度。它在用一个 5 秒的颗粒度,做一段 30 分钟的事情。所有局部最优加起来不等于全局最优 — 这是计算机课老师讲过一万遍的事,但开车的时候没人想得起来。
我真正想说的不是开车。
哈佛商学院有个叫 Ryan Buell 的教授,长期研究排队心理学。他做过一个实验:给被试可以”换队”的选项,看看大家在多排队的情况下会做出什么决定。
他发现一件事 — 末位的人最容易换队。被排到最后,那种”我被跳过了”的感觉,会被大脑无限放大成不公平。被试在末位时换队的几率,是其他位置的 3 倍(OR=3.10,p<0.01)。
但更有意思的是后半段:换一次队的人,平均多等 10%。换两次的,多等 67%。
数字非常残忍。但凡换过两次队,就基本不可能比”什么都不做”赢了。
我读完这个实验的反应是 — 我在职业生涯前几年,正是那个换两次队的人。
刚毕业那几年,我大概每两年换一份工作。每次换都涨薪 30%,每次都觉得自己离”对的方向”更近了一步。从外面看简历漂亮,从里面看自己也很努力。问题是,我每一次换的时候,看的都不是终点。
我看的是邻车。
我看的是同事去了哪、师兄拿了多少 package、今年哪个赛道是风口。我用的是一种”5 秒切片”的颗粒度,决策一段 30 年的路程。
后来我做地产,在那个行业待了十多年。这十多年里,我见过最稳的一批同行 — 不是切赛道最快的,也不是嗅觉最敏锐的,是那些把眼睛放在终点上的人。他们不是不动,他们也跳过槽、换过城市、转过岗。但他们换的是方向,不是动作。
那个差别很难一句话讲清,但它就是文章前面那个 SUV 的差别。
不只是职场。投资也是。
我有不少做投资的朋友,最痛苦的人是哪一种?是那种今天看哪个板块涨就买哪个板块,明天看哪个板块跌就割掉换下一个的人。他们一年下来交易成百上千次,账户回报却一直被市场指数压着。他们用的是 5 秒颗粒度,做一段 10 年的资产配置。
公司战略也是。
每个季度都追一个新风口的公司,每年开十次方向调整大会的公司,每个 CEO 上来就 pivot 一次的公司 — 你看着它一直很忙,一直在动,一直在”调整”。你以为它在赶路,它其实在比邻车。
你不是在赶路,是在比邻车。这就是核心。一旦你的决策动机从”我离目的地有多远”换成”我比旁边那辆车快多少”,所有动作都会变形。
切道的瞬间你确实快了一点。但那点快,被切道本身的代价吃掉了 — 加塞被让的时间、踩油门换油的成本、注意力被旁边车流牵引的损耗、动作引发的连锁刹车。这些代价你看不见,但它们一直在发生。你以为在前进,其实只是在切换。
每一次切换,你都把上一段路上积累的所有惯性 — 速度、车距、节奏、注意力 — 清零一次,重新开始。
但坚守不是免死金牌
写到这儿我必须停一下。
因为如果只看到这里,这篇文章会立刻变成另一种鸡汤 — “你看,坚守多好,深耕多牛,扔掉浮躁就赢了”。
不是这样的。
坚守不是免死金牌。
我写这篇东西的整个过程里,脑子里一直绕着一家公司的名字 — 柯达。
1972 年,柯达内部一个叫 Steven Sasson 的工程师,发明了世界上第一台数码相机。70 年代柯达占了胶片市场 70% 的份额,护城河深得像马里亚纳海沟。它有钱,有人才,有用户,连数码相机的专利都先它一步发明出来了。
它做了什么?
它把那台数码相机收进保险柜。
40 年后,2012 年,柯达申请破产。
诺基亚是另一个故事。一个前诺基亚高管在公司被微软收购那天说过一句被反复引用的话:“我们没做错任何事,但还是输了。” 他们只是太晚了。他们坚守 Symbian 的时候,整个智能手机的车道已经断了。
如果你坚守的那条道,本身就是一条会断的道,那”坚守”就不是美德,是沉没成本。
所以这件事真正的问题不是”该不该变道”。是 — 你怎么判断你那条道是均值波动还是结构性烂?
均值波动是什么意思?是你旁边那辆车暂时领先了 5 秒,但你坚持下去 30 公里之后大家都差不多。这是高速上的常态。
结构性烂是什么意思?是前方 5 公里有个事故、整条道被封了、再耗下去要再多堵两小时。这是必须切的时刻。
大多数人的纠结,是把均值波动当成结构性烂。
那怎么辨别?我自己琢磨出三个问题,给你参考一下。
第一问:你的车道终点在哪?
如果你说不出来 — 不知道自己 5 年后想去哪、想成为什么样的人、想做什么样的事 — 那你切的不是道,是恐慌。你只是在邻车更快的时候被身体推着动。这种动作叫无效里程。
第二问:你那条道的”路况”是变了 5 分钟,还是变了 5 年?
如果只是这一周公司发了个让你不爽的通知、这个月项目卡了、这个季度奖金少了,那是均值波动。如果整个行业都在收缩、整个赛道的钱都在退潮、你这个岗位 3 年内会被自动化掉一半 — 那是结构性变化。前者熬,后者跑。
第三问:你切的是动作还是方向?
Satya Nadella 在微软干了 22 年,但他在内部跨过 4 个事业部 — 从 Windows 到 Server,从 Server 到 Bing,从 Bing 到 Cloud,最后接任 CEO。这 22 年看起来”在一家公司没动”,但他每次换的都是方向。他做的不是变道,是在同一条高速上换出口。
而那种半年换一份工作、每次都说”我找到自己的方向了”的人,他换的只是动作。新的工作和旧的工作在做同一件事,只是公司名变了。这叫横移,不叫前进。
变道这件事还有一些场景,本来就该切。出口前必须切。前方有事故必须切。你听见救护车鸣笛必须让。F1 赛车场上一次进站时机就能翻盘。高频交易里 50 毫秒的延迟差直接让你亏钱 — 那是战术性切换,不是邻车攀比。它们不属于这篇文章在讨论的范围。
我说的”不变道”,只指稳态拥堵 + 心理消耗大于时间收益 + 车道结构对称这一种场景。在这种场景里,切的次数越多,输得越多。
哈佛 Buell 的数据再说一次:换两次队的人,平均多等 67%。
剩下的,请自己分辨。
五年后还能看见它吗
那辆白色 SUV 后来去了哪儿,我不知道。

我下高速的时候它停在我后面,再之后我就没回头。回头干什么呢?回头也没什么意义。它只是众多个、在那一段路上做着相同动作的车里的一辆。
我也没什么资格嘲笑它。
我刚才说过,我职业前几年也是那种 weaver — 每一次换工作都觉得自己抓住了”看起来更快的那条道”。直到很多年之后我才意识到,那段时间我累得要死,但里程数其实一直没怎么涨。
所以我对它没什么气。我只是在那 30 公里里、看着它一遍又一遍地切道时,心里冒出一种很安静的、说不清是同情还是自怜的东西。
写这篇文章的时候,我又想起那个画面。
后视镜里,那辆 SUV 一会儿出现在左后方,一会儿出现在右后方,一会儿不见了,一会儿又冒出来。它一直在动。它一直在做决定。它一直觉得自己离”更前面”更近一点。
但它一直在我视野里。
我想问一个问题。
你最近一次”切道”是什么时候?
不一定是工作。可能是刚开始读的那本书,三天后又换了一本。可能是上周下载的那个 to-do app,今天又删掉换了一个。可能是去年决定的那个学习方向,半年后改了,今年又改了一次。也可能是那个一直没敢动、但你心里已经切了三百次道的决定。
后来呢?
你切完之后,五年过去了。你跑到很前面了吗?
那辆白色 SUV 大概率还在某条高速上。它会一直在某条高速上。它甚至可能一直在你后视镜里。
至于你 — 我也不知道。
我只是把这件事写下来。
你可以看看。
你最近一次”变道”是切动作还是切方向?欢迎留言告诉我。